المزايا الرئيسية
ثلاث وظائف في جهاز واحد
- برمجة عبر Mass Storage (MSC) – انسخ ملفات
.bin/.hexلبرمجة ذاكرة Flash. - منفذ COM افتراضي (CDC) – سجلات ووحدة تحكم تفاعلية بدون محول USB‑UART منفصل.
- تصحيح CMSIS‑DAP – يعمل كمسبار CMSIS‑DAP قياسي لدعم نقاط التوقف والوصول إلى الذاكرة.
عتاد سهل الدمج
- USB‑C هو موصل المضيف الوحيد – طاقة وبيانات SWD/JTAG عبر كابل واحد.
- موصلات على حافة اللوحة لتوجيه إشارات SWD و UART إلى لوحاتك الرئيسية.
- منظمات وحماية على اللوحة مناسبة لمعظم الأهداف 3.3 V القائمة على Cortex‑M.
نظام بيئي مفتوح · معيار CMSIS‑DAP
- مبني على مشروع Arm Mbed DAPLink مفتوح المصدر.
- بروتوكول CMSIS‑DAP قياسي – غير مقيد بمورّد MCU واحد.
- يمكن إعادة بناء برمجيات الواجهة لدعم أهداف إضافية أو ميزات مخصّصة.
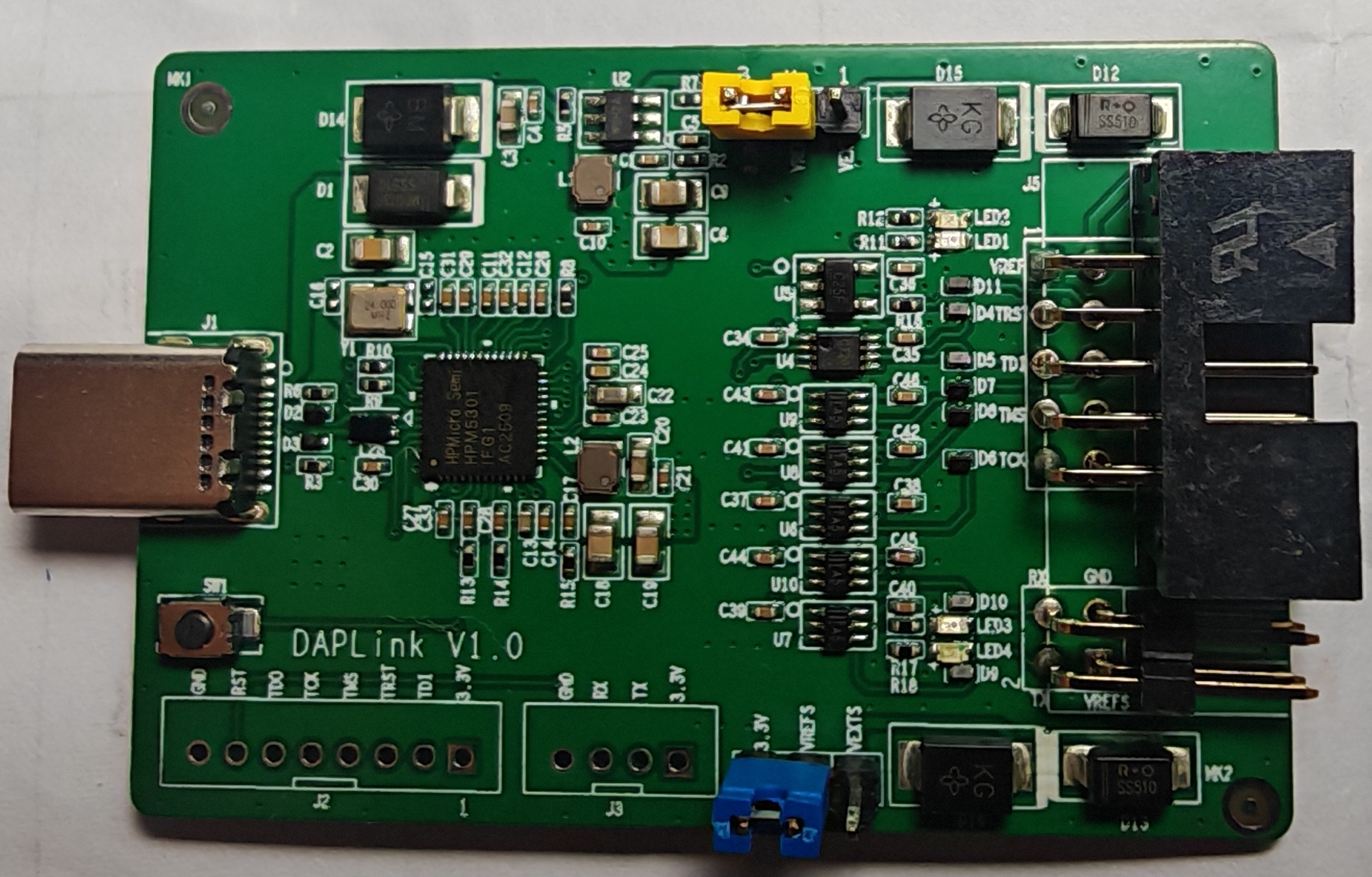
نظرة عامة على العتاد
| البند | التفاصيل |
|---|---|
| MCU الواجهة | MCU من عائلة ARM Cortex‑M تشغّل برمجيات واجهة DAPLink (فئة LPC / STM32). |
| اتصال بالكمبيوتر | USB Type‑C؛ طاقة 5 فولت وبيانات. |
| واجهات إلى الهدف | رأس تصحيح SWD/JTAG + رأس UART (TX/RX/GND، منطق 3.3 فولت). |
| التغذية | 5 فولت من USB‑C، منظمات على اللوحة؛ دبوس VREF لاستشعار جهد I/O للهدف (عادة 2.3–3.3 فولت). |
| مؤشرات | عدة مصابيح LED لحالة التصحيح ومراقبة VREF وتشخيص الطاقة. |
| تحديث البرمجيات الثابتة | زر على اللوحة للدخول إلى وضع bootloader – لتحديث برمجيات واجهة DAPLink عند الحاجة. |
| العامل الشكلي | لوحة PCB مدمجة، جاهزة للتركيب في صندوق صغير (انظر صورة الهيكل). |
الموصلات والإشارات
رأس DEBUG (SWD / JTAG)
- أطراف نموذجية: TCK/SWCLK، TMS/SWDIO، TDI، TDO، nRESET، VREF، GND.
- يُستخدم للتصحيح على الشريحة وبرمجة Flash واختبارات الإنتاج.
رأس UART
- الإشارات: TX، RX، GND، 3.3 فولت.
- يعمل كمنفذ وحدة تحكم للوحة الهدف – مثالي للسجلات والوصول إلى الـ shell.
الأزرار / الجسور (Jumpers)
- زر للدخول إلى وضع bootloader أو إعادة ضبط MCU الواجهة (وفق تكوين البرمجيات الثابتة).
- جسور لتكوين تغذية الهدف أو وضع التشغيل حسب تصميم اللوحة النهائي.
بدء سريع
1
توصيل العتاد
- وصّل DAP‑LINK بالكمبيوتر باستخدام كابل USB‑C.
- وصّل رأس DEBUG برأس SWD/JTAG على لوحة الهدف، وإذا لزم الأمر وصّل أيضاً UART.
- تأكد من أن تغذية الهدف وجهد VREF (عادة 3.3 فولت) صحيحة.
2
البرمجة بالسحب‑والإفلات
- سيظهر قرص USB جديد على الكمبيوتر (يعتمد الاسم على نسخة البرمجيات الثابتة).
- انسخ ملف
.bin/.hexالمترجَم إلى هذا القرص. - DAP‑LINK سيبرمج تلقائياً ذاكرة Flash في MCU الهدف.
3
سجل تسلسلي وتصحيح
- سيتم توفير منفذ COM افتراضي – افتحه في برنامج الطرفية المفضّل لديك لعرض السجلات.
- في Keil / pyOCD / OpenOCD اختر جهاز CMSIS‑DAP وابدأ التصحيح على مستوى الشيفرة المصدرية.
الأسئلة الشائعة
ما هي الأدوات المدعومة؟
أي مصحح أخطاء يدعم CMSIS‑DAP: مثل Keil MDK و Arm DS و pyOCD وبعض إعدادات OpenOCD وبيئات VS Code التي تستخدم CMSIS‑DAP كـ backend.
ما الفرق عن ST‑LINK / J‑LINK؟
يعتمد DAP‑LINK على مشروع DAPLink مفتوح المصدر وبروتوكول CMSIS‑DAP القياسي، لذلك لا يرتبط بنظام بيئي لمورّد واحد. يمكن استخدامه كرأس تصحيح عام للوحاتك ومنتجاتك.
هل يمكن تخصيص أو استبدال البرمجيات الثابتة؟
نعم. يمكن تحديث MCU الواجهة ببنايات مختلفة من DAPLink لدعم أهداف جديدة أو إضافة ميزات مخصّصة.