Fonctionnalités principales
Trois fonctions en une seule
- Programmation par stockage de masse (MSC) – copiez des fichiers
.bin/.hexpour programmer la Flash. - Port COM virtuel (CDC) – journalisation et console interactive sans adaptateur USB‑UART séparé.
- Débogage CMSIS‑DAP – agit comme une sonde CMSIS‑DAP standard pour les points d’arrêt et l’accès mémoire.
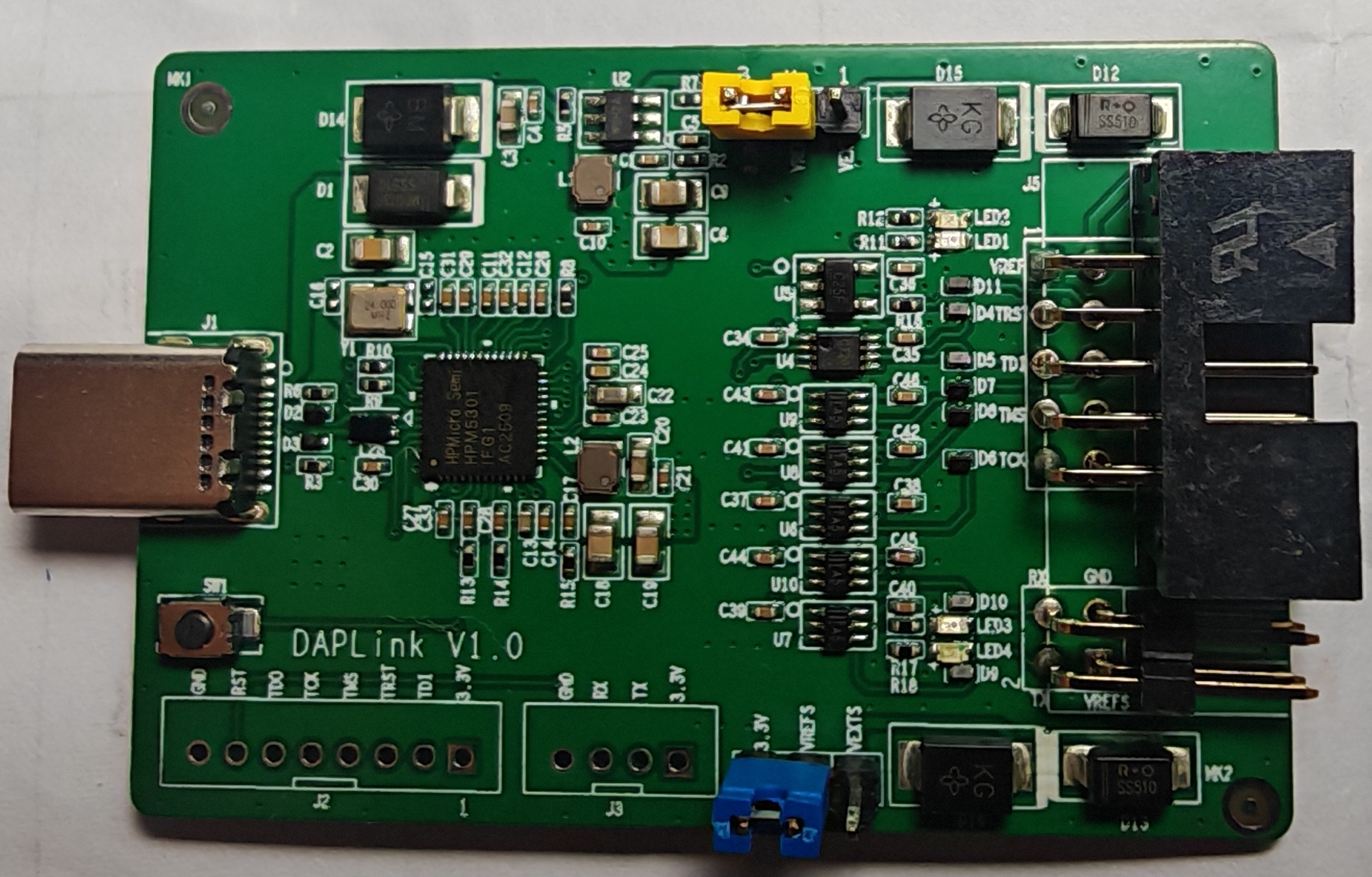
Matériel facile à intégrer
- USB‑C comme unique connecteur côté hôte – alimentation et données SWD/JTAG dans un seul câble.
- Connecteurs en bord de carte pour router SWD et UART vers vos propres cartes mères.
- Régulation et protection intégrées adaptées aux cibles Cortex‑M 3,3 V les plus courantes.
Écosystème ouvert · norme CMSIS‑DAP
- Basé sur le projet open source Arm Mbed DAPLink.
- Protocole standard CMSIS‑DAP, non lié à un seul fournisseur de MCU.
- Le firmware d’interface peut être recompilé pour prendre en charge d’autres cibles ou des fonctions personnalisées.
Vue d’ensemble matériel
| Élément | Détails |
|---|---|
| MCU d’interface | MCU ARM Cortex‑M exécutant le firmware d’interface DAPLink (gamme LPC / STM32). |
| Connexion PC | USB Type‑C ; alimentation 5 V et données. |
| Interfaces vers la cible | Connecteur de débogage SWD/JTAG + connecteur UART (TX/RX/GND, logique 3,3 V). |
| Alimentation | 5 V via USB‑C, régulateurs intégrés ; broche VREF pour détecter la tension d’E/S de la cible (généralement 2,3–3,3 V). |
| Indicateurs | Plusieurs LED pour l’état du débogage, la surveillance de VREF et le diagnostic d’alimentation. |
| Mise à jour du firmware | Bouton sur la carte pour passer en mode bootloader – mise à jour du firmware d’interface DAPLink si nécessaire. |
| Format | PCB compact, prêt à être intégré dans un petit boîtier (voir le rendu du boîtier). |
Connecteurs & signaux
Connecteur DEBUG (SWD / JTAG)
- Broches typiques : TCK/SWCLK, TMS/SWDIO, TDI, TDO, nRESET, VREF, GND.
- Utilisé pour le débogage sur puce, la programmation de la Flash et les tests de production.
Connecteur UART
- Signaux : TX, RX, GND, 3,3 V.
- Fonctionne comme port de console de la cible – idéal pour les journaux et l’accès shell.
Boutons / cavaliers
- Bouton pour entrer dans le bootloader ou réinitialiser la MCU d’interface (selon le firmware).
- Cavaliers pour configurer l’alimentation de la cible ou le mode de fonctionnement, selon le design final de la PCB.
Démarrage rapide
1
Connecter le matériel
- Connectez DAP‑LINK à votre PC à l’aide d’un câble USB‑C.
- Reliez le connecteur DEBUG au connecteur SWD/JTAG de la carte cible et, si nécessaire, connectez également l’UART.
- Vérifiez que l’alimentation et la tension VREF de la cible (généralement 3,3 V) sont correctes.
2
Programmation par glisser‑déposer
- Un nouveau disque USB apparaît sur le PC (le nom dépend du build de firmware).
- Copiez le fichier
.bin/.hexcompilé sur ce disque. - DAP‑LINK programme automatiquement la Flash du MCU cible.
3
Log série & débogage
- Un port COM virtuel est exposé – ouvrez‑le dans votre terminal préféré pour voir les logs.
- Dans Keil / pyOCD / OpenOCD, sélectionnez le périphérique CMSIS‑DAP et lancez le débogage au niveau du code source.
FAQ
Quelles sont les outils pris en charge ?
Tous les débogueurs compatibles CMSIS‑DAP : Keil MDK, Arm DS, pyOCD, certaines configurations OpenOCD et les environnements VS Code utilisant des backends CMSIS‑DAP.
Quelle différence avec ST‑LINK / J‑LINK ?
DAP‑LINK s’appuie sur le projet open source DAPLink et sur le protocole standard CMSIS‑DAP, il n’est donc pas limité à l’écosystème d’un seul fournisseur. Il convient bien comme tête de débogage générique pour vos propres cartes et gammes de produits.
Puis‑je personnaliser ou remplacer le firmware ?
Oui. La MCU d’interface peut être mise à jour avec différents builds DAPLink afin de prendre en charge de nouvelles cibles ou d’ajouter des fonctionnalités spécifiques.