Hauptfunktionen
Drei Funktionen in einem Gerät
- Massenspeicher‑Programmierung (MSC) –
.bin‑ /.hex‑Dateien kopieren, um den Flash zu programmieren. - Virtuelle COM‑Schnittstelle (CDC) – Log‑Ausgabe und interaktive Konsole ohne separates USB‑UART‑Interface.
- CMSIS‑DAP‑Debugging – fungiert als standardkonforme CMSIS‑DAP‑Probe für Breakpoints und Speicherzugriffe.
Einfach integrierbare Hardware
- USB‑C als einziger Host‑Anschluss – Stromversorgung und SWD/JTAG‑Daten über ein Kabel.
- Leiterplatten‑Randstecker, um SWD und UART auf eigene Basisplatinen zu führen.
- On‑Board‑Regelung und Schutz für typische 3,3‑V‑Cortex‑M‑Zielsysteme.
Offenes Ökosystem · CMSIS‑DAP‑Standard
- Basierend auf dem Open‑Source‑Projekt Arm Mbed DAPLink.
- Standard‑CMSIS‑DAP‑Protokoll, nicht an einen einzelnen MCU‑Hersteller gebunden.
- Das Interface‑Firmware kann neu kompiliert werden, um weitere Targets oder kundenspezifische Funktionen zu unterstützen.
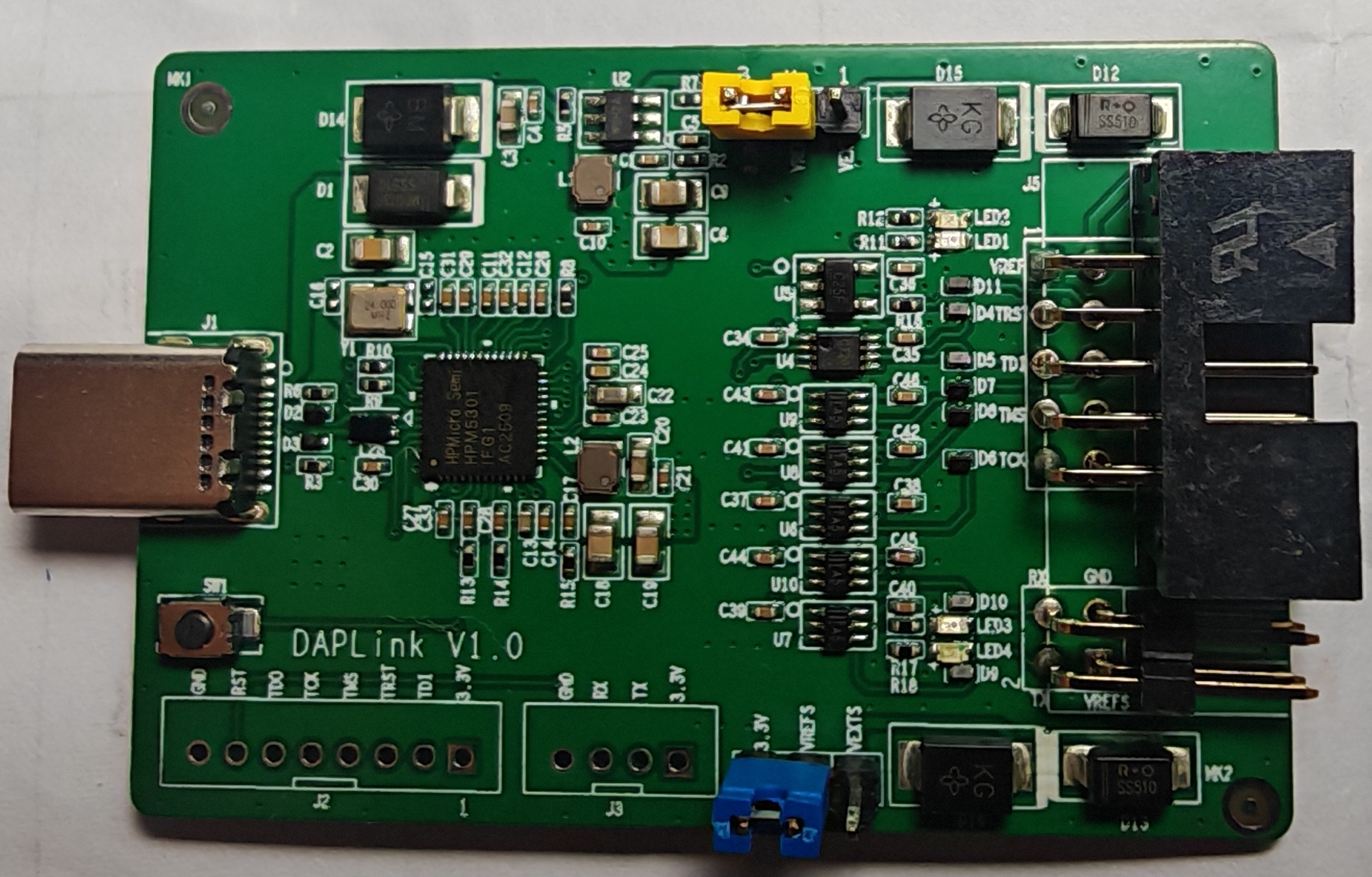
Hardware‑Überblick
| Eintrag | Details |
|---|---|
| Interface‑MCU | ARM‑Cortex‑M‑MCU, die die DAPLink‑Interface‑Firmware ausführt (z. B. LPC‑/STM32‑Klasse). |
| PC‑Verbindung | USB Type‑C; 5‑V‑Versorgung und Daten. |
| Interfaces zum Ziel | SWD/JTAG‑Debug‑Header + UART‑Header (TX/RX/GND, 3,3‑V‑Logik). |
| Versorgung | 5 V über USB‑C, Spannungsregler auf der Platine; VREF‑Pin zur Erkennung der I/O‑Spannung des Zielsystems (typisch 2,3–3,3 V). |
| Anzeigeelemente | Mehrere LEDs für Debug‑Status, VREF‑Überwachung und Spannungsdiagnose. |
| Firmware‑Update | On‑Board‑Taste, um in den Bootloader‑Modus zu wechseln – DAPLink‑Interface‑Firmware bei Bedarf aktualisieren. |
| Formfaktor | Kompakte Leiterplatte, bereit für den Einbau in ein kleines Gehäuse (siehe Gehäuse‑Rendering). |
Steckverbinder & Signale
DEBUG‑Header (SWD / JTAG)
- Typische Pins: TCK/SWCLK, TMS/SWDIO, TDI, TDO, nRESET, VREF, GND.
- Für On‑Chip‑Debugging, Flash‑Programmierung und Produktionstests.
UART‑Header
- Signale: TX, RX, GND, 3,3 V.
- Dient als Konsolenport des Zielsystems – ideal für Logs und Shell‑Zugriff.
Taster / Jumper
- Taste zum Aufruf des Bootloaders oder zum Zurücksetzen der Interface‑MCU (je nach Firmware‑Konfiguration).
- Jumper zur Konfiguration der Ziel‑Stromversorgung oder des Betriebsmodus gemäß finalem PCB‑Design.
Schnellstart
1
Hardware anschließen
- Verbinden Sie DAP‑LINK per USB‑C‑Kabel mit Ihrem PC.
- Schließen Sie den DEBUG‑Header an den SWD/JTAG‑Header der Zielplatine an und ggf. auch den UART‑Header.
- Stellen Sie sicher, dass Versorgung und VREF‑Spannung des Zielsystems (typisch 3,3 V) korrekt sind.
2
Drag‑and‑Drop‑Flashen
- Auf dem PC erscheint ein neues USB‑Laufwerk (Name abhängig vom Firmware‑Build).
- Kopieren Sie die kompilierte
.bin‑ /.hex‑Datei auf dieses Laufwerk. - DAP‑LINK programmiert automatisch den Flash des Ziel‑MCU.
3
Serielle Logs & Debugging
- Eine virtuelle COM‑Schnittstelle wird bereitgestellt – öffnen Sie sie in Ihrem Terminal, um Logs zu sehen.
- Wählen Sie in Keil / pyOCD / OpenOCD das CMSIS‑DAP‑Gerät und starten Sie das Debugging auf Quelltextebene.
FAQ
Welche Tools werden unterstützt?
Alle Debugger, die CMSIS‑DAP unterstützen: Keil MDK, Arm DS, pyOCD, einige OpenOCD‑Konfigurationen sowie VS‑Code‑Umgebungen mit CMSIS‑DAP‑Backend.
Worin unterscheidet sich DAP‑LINK von ST‑LINK / J‑LINK?
DAP‑LINK basiert auf dem Open‑Source‑Projekt DAPLink und dem standardisierten CMSIS‑DAP‑Protokoll und ist nicht an ein einzelnes Hersteller‑Ökosystem gebunden. Er eignet sich daher gut als generischer Debug‑Kopf für eigene Boards und Produktreihen.
Kann ich die Firmware anpassen oder ersetzen?
Ja. Die Interface‑MCU kann mit verschiedenen DAPLink‑Builds aktualisiert werden, um neue Targets zu unterstützen oder spezielle Funktionen hinzuzufügen.