Funzioni principali
Tre funzioni in un solo dispositivo
- Programmazione tramite Mass Storage (MSC) – copia dei file
.bin/.hexper programmare la Flash. - Porta COM virtuale (CDC) – log e console interattiva senza adattatore USB‑UART separato.
- Debug CMSIS‑DAP – funziona come una sonda CMSIS‑DAP standard per breakpoint e accesso alla memoria.
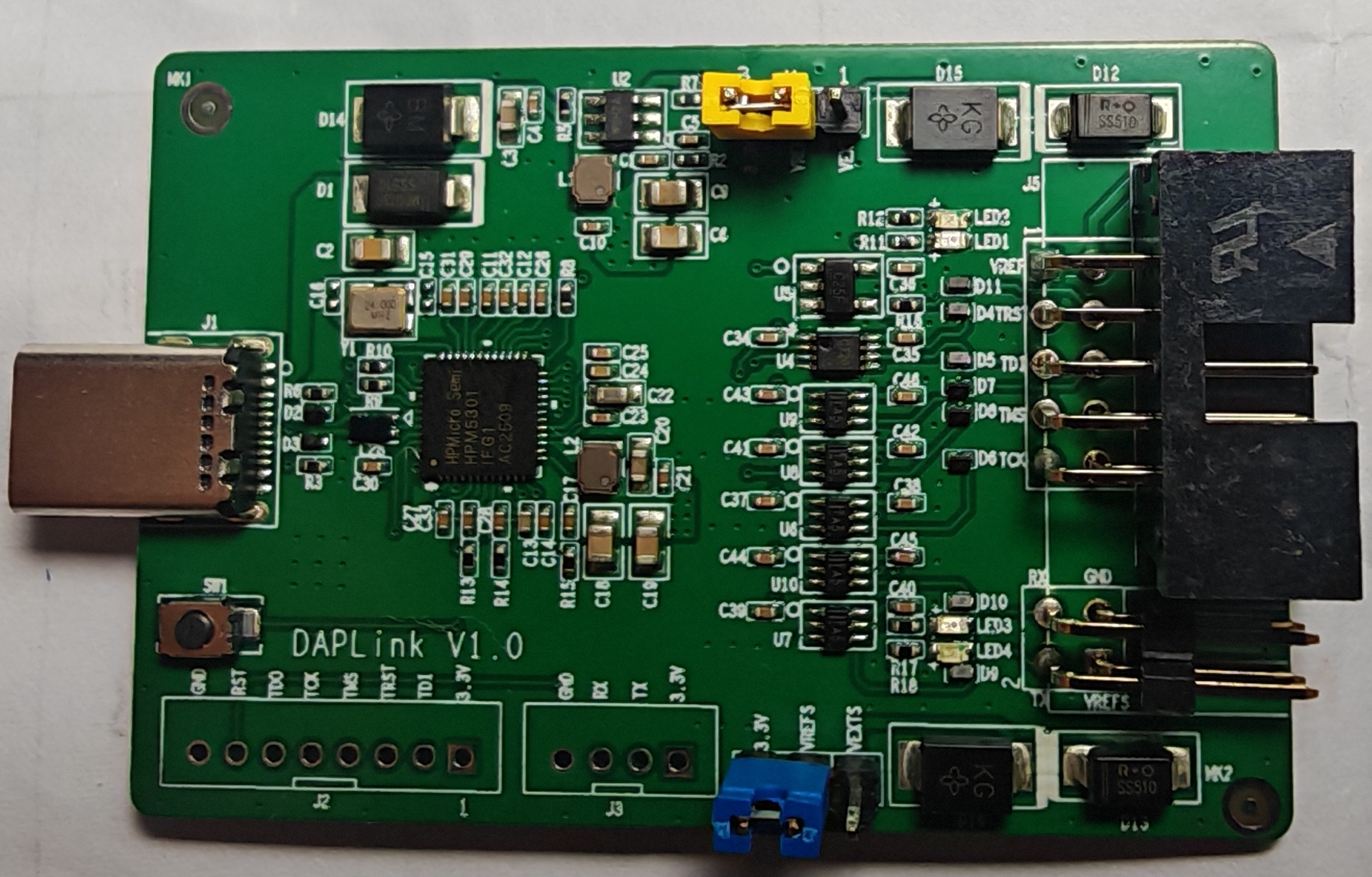
Hardware facile da integrare
- USB‑C come unico connettore lato host – alimentazione e dati SWD/JTAG su un unico cavo.
- Header sul bordo scheda per instradare SWD e UART verso le tue mainboard.
- Regolazione e protezione on‑board pensate per target Cortex‑M a 3,3 V.
Ecosistema aperto · standard CMSIS‑DAP
- Basato sul progetto open source Arm Mbed DAPLink.
- Protocollo CMSIS‑DAP standard, non legato a un singolo fornitore di MCU.
- Il firmware di interfaccia può essere ricompilato per supportare nuovi target o funzioni personalizzate.
Panoramica hardware
| Voce | Dettagli |
|---|---|
| MCU di interfaccia | MCU ARM Cortex‑M che esegue il firmware di interfaccia DAPLink (classe LPC / STM32). |
| Connessione al PC | USB Type‑C; alimentazione 5 V e dati. |
| Interfacce verso il target | Header di debug SWD/JTAG + header UART (TX/RX/GND, logica 3,3 V). |
| Alimentazione | 5 V da USB‑C, regolatori on‑board; pin VREF per rilevare la tensione I/O del target (tipicamente 2,3–3,3 V). |
| Indicatori | Diverse LED per stato di debug, monitoraggio VREF e diagnostica dell'alimentazione. |
| Aggiornamento firmware | Pulsante on‑board per entrare in modalità bootloader – aggiornare il firmware di interfaccia DAPLink quando necessario. |
| Form factor | PCB compatto, pronto per essere inserito in un piccolo contenitore (vedi rendering del case). |
Connettori & segnali
Header DEBUG (SWD / JTAG)
- Pin tipici: TCK/SWCLK, TMS/SWDIO, TDI, TDO, nRESET, VREF, GND.
- Utilizzato per debug on‑chip, programmazione Flash e test di produzione.
Header UART
- Segnali: TX, RX, GND, 3,3 V.
- Funziona come porta console del target – ideale per log e accesso shell.
Pulsanti / jumper
- Pulsante per entrare nel bootloader o resettare la MCU di interfaccia (a seconda del firmware).
- Jumper per configurare l'alimentazione del target o la modalità operativa secondo il design finale della PCB.
Guida rapida
1
Collega l'hardware
- Collega DAP‑LINK al PC tramite un cavo USB‑C.
- Collega l'header DEBUG all'header SWD/JTAG della scheda target e, se necessario, collega anche l'UART.
- Verifica che alimentazione e tensione VREF del target (di solito 3,3 V) siano corrette.
2
Programmazione drag‑and‑drop
- Sul PC apparirà una nuova unità USB (il nome dipende dal build del firmware).
- Copia il file
.bin/.hexcompilato su tale unità. - DAP‑LINK programmerà automaticamente la Flash della MCU target.
3
Log seriale & debug
- Viene esposta una porta COM virtuale – aprila con il tuo terminale preferito per vedere i log.
- In Keil / pyOCD / OpenOCD seleziona il dispositivo CMSIS‑DAP e avvia il debug a livello di sorgente.
FAQ
Quali strumenti sono supportati?
Tutti i debugger che parlano CMSIS‑DAP: Keil MDK, Arm DS, pyOCD, alcune configurazioni OpenOCD e gli ambienti VS Code che usano backend CMSIS‑DAP.
In cosa è diverso da ST‑LINK / J‑LINK?
DAP‑LINK si basa sul progetto open source DAPLink e sul protocollo CMSIS‑DAP standard, quindi non è vincolato all'ecosistema di un singolo fornitore. È un'ottima testina di debug generica per le tue schede e linee di prodotto.
Posso personalizzare o sostituire il firmware?
Sì. La MCU di interfaccia può essere aggiornata con diversi build DAPLink per supportare nuovi target o aggiungere funzionalità specifiche.