Najważniejsze funkcje
Trzy funkcje w jednym urządzeniu
- Programowanie przez Mass Storage (MSC) – skopiuj pliki
.bin/.hex, aby zaprogramować pamięć Flash. - Wirtualny port COM (CDC) – logi i konsola interaktywna bez osobnego adaptera USB‑UART.
- Debugowanie CMSIS‑DAP – działa jak standardowa sonda CMSIS‑DAP, obsługując breakpointy i dostęp do pamięci.
Sprzęt łatwy do integracji
- USB‑C jako jedyne złącze po stronie hosta – zasilanie i dane SWD/JTAG w jednym kablu.
- Złącza krawędziowe pozwalają wyprowadzić sygnały SWD i UART na własne płyty główne.
- Wbudowane układy regulacji i zabezpieczeń, dostosowane do typowych targetów Cortex‑M 3,3 V.
Otwarte ekosystem · standard CMSIS‑DAP
- Oparty na otwartym projekcie Arm Mbed DAPLink.
- Standardowy protokół CMSIS‑DAP, bez przywiązania do jednego dostawcy MCU.
- Firmware interfejsu można rekompilować, aby obsłużyć nowe układy lub funkcje niestandardowe.
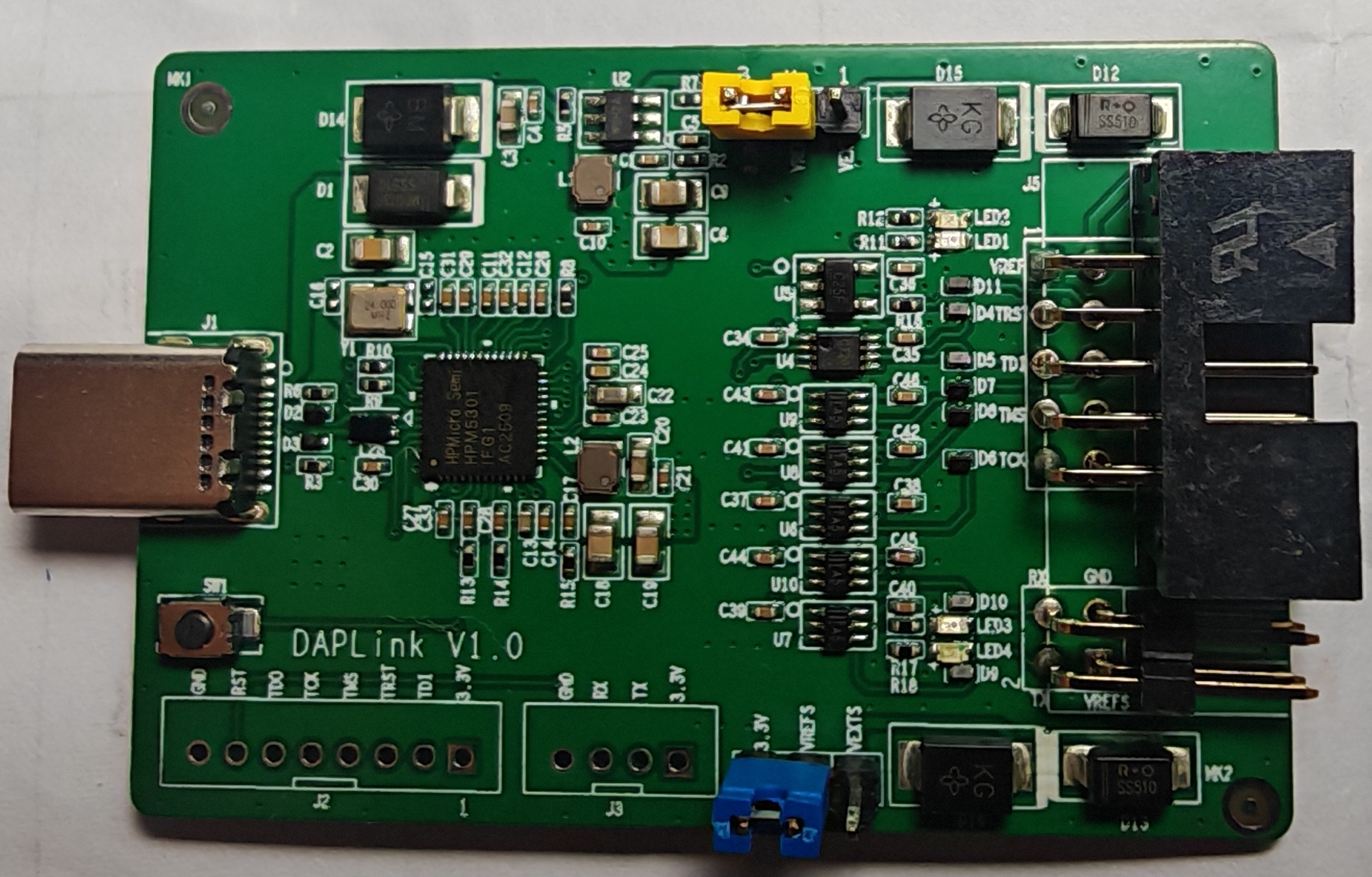
Przegląd sprzętu
| Pozycja | Opis |
|---|---|
| Mikrokontroler interfejsu | Mikrokontroler ARM Cortex‑M uruchamiający firmware interfejsu DAPLink (klasa LPC / STM32). |
| Połączenie z PC | USB Type‑C; zasilanie 5 V i dane. |
| Interfejsy do targetu | Złącze debug SWD/JTAG + złącze UART (TX/RX/GND, logika 3,3 V). |
| Zasilanie | 5 V z USB‑C, stabilizatory na płytce; pin VREF do pomiaru napięcia I/O targetu (zwykle 2,3–3,3 V). |
| Wskaźniki | Kilka diod LED informujących o stanie debugowania, monitoringu VREF i diagnostyce zasilania. |
| Aktualizacja firmware’u | Przycisk na płytce umożliwiający wejście w tryb bootloadera – aktualizacja firmware’u interfejsu DAPLink w razie potrzeby. |
| Form factor | Kompaktowa płytka PCB, gotowa do montażu w niewielkiej obudowie (patrz render obudowy). |
Złącza i sygnały
Złącze DEBUG (SWD / JTAG)
- Typowe piny: TCK/SWCLK, TMS/SWDIO, TDI, TDO, nRESET, VREF, GND.
- Używane do debugowania na układzie, programowania Flash i testów produkcyjnych.
Złącze UART
- Sygnały: TX, RX, GND, 3,3 V.
- Pełni funkcję portu konsoli targetu – idealne do logów i dostępu do powłoki.
Przyciski / zworki
- Przycisk służy do wejścia w tryb bootloadera lub resetu mikrokontrolera interfejsu (w zależności od firmware’u).
- Zworki pozwalają konfigurować zasilanie targetu lub tryb pracy zgodnie z finalnym projektem PCB.
Szybki start
1
Podłącz sprzęt
- Podłącz DAP‑LINK do komputera przewodem USB‑C.
- Połącz złącze DEBUG ze złączem SWD/JTAG na płytce targetu; w razie potrzeby podłącz również UART.
- Upewnij się, że zasilanie i napięcie VREF targetu (zwykle 3,3 V) są prawidłowe.
2
Programowanie drag‑and‑drop
- Na komputerze pojawi się nowy dysk USB (nazwa zależy od wersji firmware’u).
- Skopiuj na niego skompilowany plik
.bin/.hex. - DAP‑LINK automatycznie zaprogramuje pamięć Flash mikrokontrolera docelowego.
3
Logowanie szeregowe i debugowanie
- Pojawi się wirtualny port COM – otwórz go w ulubionym terminalu, aby zobaczyć logi.
- W Keil / pyOCD / OpenOCD wybierz urządzenie CMSIS‑DAP i rozpocznij debugowanie na poziomie kodu źródłowego.
FAQ
Jakie narzędzia są obsługiwane?
Dowolne debugery obsługujące CMSIS‑DAP: Keil MDK, Arm DS, pyOCD, niektóre konfiguracje OpenOCD oraz środowiska VS Code wykorzystujące backend CMSIS‑DAP.
Czym DAP‑LINK różni się od ST‑LINK / J‑LINK?
DAP‑LINK bazuje na otwartym projekcie DAPLink i standardowym protokole CMSIS‑DAP, dzięki czemu nie jest przywiązany do ekosystemu jednego producenta. Może być uniwersalną głowicą debugującą dla własnych płytek i produktów.
Czy mogę dostosować lub wymienić firmware?
Tak. MCU interfejsu można aktualizować różnymi buildami DAPLink, aby obsłużyć nowe targety lub dodać niestandardowe funkcje.